The ability of humans to seamlessly interact with their environment—such as picking up a book from a shelf—belies the complexity of the cognitive processes involved. Unlike simple actions one might think to be intuitive, these tasks require sophisticated planning and spatial awareness. Our brains naturally navigate around obstacles, adjusting movements dynamically in real-time. In contrast, traditional robotics has struggled to replicate this fluidity of motion, often relying on rigid algorithms that fall short in unpredictable settings.
This dichotomy between human adaptability and robotic limitations has led researchers to explore new avenues of developing motion planning techniques that better emulate human behavior. With the complexities inherent in real-world environments, particularly those within homes filled with diverse objects, the quest for improved robotic motion capabilities has intensified.
Recently, a groundbreaking advancement from the Robotics Institute at Carnegie Mellon University has emerged—Neural Motion Planning. This innovative approach leverages artificial intelligence to navigate complex environments, thus enabling robots to react to their surroundings in a more human-like manner. Rather than follow traditional, slow-motion planning methods fraught with numerous collision checks, Neural Motion Planning introduces a new paradigm in which a versatile deep learning model learns to perform tasks across various household settings.
Murtaza Dalal, a doctoral student at the institute, aptly points out that deploying robots in unpredictable environments poses significant challenges to existing motion planning algorithms. These challenges stem from the inherent assumptions made in traditional models, which can quickly become irrelevant as circumstances change. Neural Motion Planning overcomes these obstacles by utilizing a data-driven method, creating a system able to function in unfamiliar conditions, whether it be placing dishes in a dishwasher or navigating around playful pets.
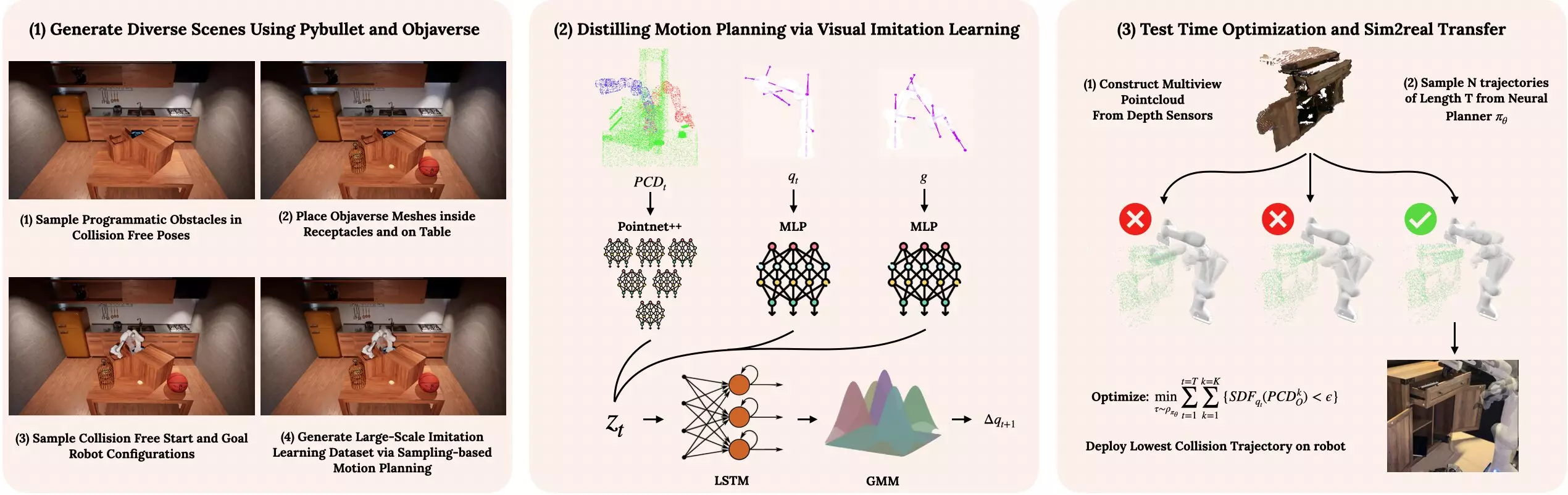
The inspiration behind Neural Motion Planning stems from a fundamental understanding of human skill development. Just as humans initially approach tasks slowly and with caution, gradually honing their abilities through practice, this robotic system mimics that learning trajectory. By simulating millions of varying environments filled with obstacles, ranging from traditional household items to unexpected surprises like a puppy, the researchers equipped Neural Motion Planning with a repository of experiences that inform its decision-making process.
Using these simulations, the system was trained to facilitate both rapid and reactive planning. The outcomes were distilled into a generalized policy that allows the robots to tackle challenges not present in the initial training phases. This innovative approach signifies a giant leap towards building robots that can learn from experience rather than relying solely on pre-programmed responses.
A significant milestone in robotics has been achieved through Neural Motion Planning that lays the groundwork for future developments. Deepak Pathak, a leading figure in the research team, emphasizes the necessity of large-scale learning across various domains, citing the successes witnessed in areas like vision and language processing—fields where comprehensive models have led to breakthroughs akin to ChatGPT.
The real-world application of Neural Motion Planning was tested using a robotic arm, which showcased its capability to navigate unfamiliar home settings deftly. This arm was provided with a three-dimensional understanding of its environment, generated from depth sensors, and tasked to move toward a predefined endpoint. The results demonstrated a remarkable level of efficiency and precision as the arm skillfully avoided obstacles like furniture and other potential hindrances.
The implications of Neural Motion Planning are profound, potentially altering the landscape of how robots interact with dynamic environments. By enhancing the ability of robotic systems to react autonomously and efficiently in varying contexts, this research paves the way for robots not only to assist in household tasks but also to venture into more complex settings such as healthcare and disaster response.
As researchers continue to refine and expand upon these models, the future of robotics appears bright. Neural Motion Planning stands as a crucial step towards achieving truly intelligent systems capable of performing seamlessly in a world that is as unpredictable as it is varied. While still in its early days, the promise of this technology inspires excitement and anticipation for a day when robots can operate alongside humans with the same easy fluidity that we have long taken for granted.