The elephant’s trunk stands as a pointer to the pinnacle of evolutionary design, merging complexity and functionality. With a staggering array of 17 distinct muscles, this appendage allows the elephant to perform tasks ranging from grabbing food to trumpeting, not to mention its role in social interactions and even self-grooming. Given these abilities, the trunk serves as an extraordinary example of dexterity and adaptability found in the animal kingdom. Recent work by a research team has sought to capture the remarkable mechanics of this natural marvel by creating a functional model that mimics its capabilities through the use of just three actuators. This breakthrough could pioneer advancements in robotics and biomimetic design.
From Animals to Algorithms: The Research Journey
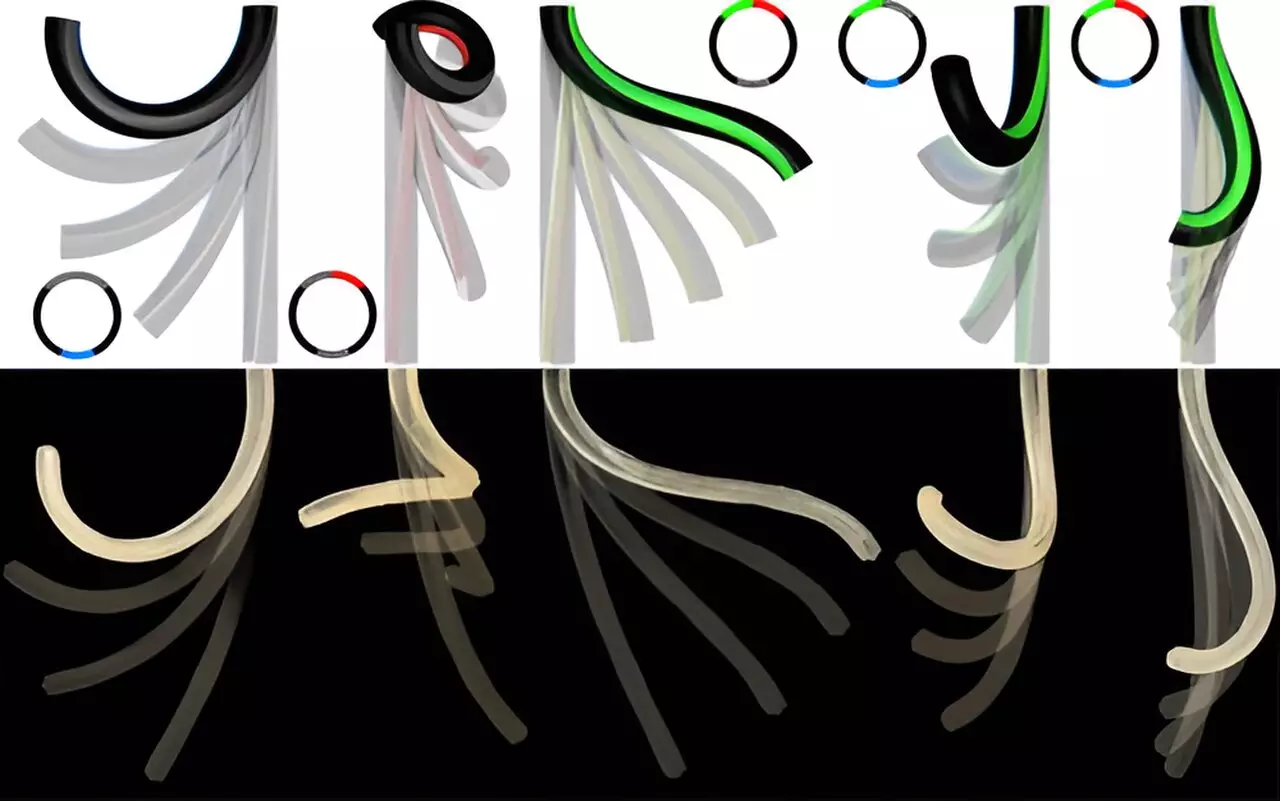
The convergence of mathematical models and biological understanding has long been a treasure trove for innovation, and the elephant trunk research showcases precisely this union. Academic teams combining experts from Stanford University and the University of Oxford approached the challenge with a keen analytical lens. Their goal was clear: to distill the trunk’s complex motor functions down to a simpler model, effective in both movement and application. By simplifying the intricate network of muscle mechanics into three core actuators—longitudinal and helical—the researchers dared to ask whether they could replicate the same flexibility and reach of the elephant trunk with minimal components.
Through mathematical modeling, the researchers produced simulations demonstrating various motions reminiscent of the elephant’s flexible appendage. The specificity of movements—curvature, torsion, and three-dimensional bending—provided insight into how a streamlined mechanism could offer answers for robotic applications. The idea was not just to mimic, but to understand the physics underlying an organic model, and apply this knowledge in practical robotic designs.
Breaking Down the Mechanics: Transforming Concepts into Reality
Transforming theory into practice involves tackling the nuances of engineering a physical model. The researchers opted for a polymer-based cylindrical structure to translate their mathematical findings into a tangible mechanism. This choice of materials is significant, as it allows for greater flexibility and responsiveness compared to traditional robotic materials.
Utilizing 3D printing technology, the team crafted actuators composed of liquid-crystalline elastomer fibers, which behave like muscle tissues when subjected to heat. This aspect is vital; through Joule heating—inducing contraction—each actuator could function independently, echoing the independent muscles within an actual trunk. The intricate play of bending and twisting produced by these actuators not only replicated the form and function of the elephant’s trunk but also revealed the potential for a new generation of robots that can navigate complex environments.
Discovering the Reachability Cloud: The New Frontier of Movement
A critical aspect of the study was the evaluation of the model trunk’s ability to navigate its surroundings—its “reachability.” The researchers calculated a three-dimensional reachability cloud, a visual representation of the volume of space the trunk could cover. The findings were impressive: the designed trunk could maneuver effortlessly through an expansive 360-degree arc.
In contrast to more conventional robotic designs—such as those using multiple longitudinal actuators—the minimal three-actuator model surpassed expectations, displaying greater versatility and movement possibilities. This expansive reachability is essential for practical applications in fields ranging from automated assembly lines to sophisticated robotic companions, allowing the design to perform multiple tasks seamlessly.
Challenges Ahead: Limitations and Opportunities
As groundbreaking as this research may be, it does come with caveats. The current model presents limitations, particularly its inability to stretch or shorten as an actual trunk does. Moreover, investigations into how effectively this simplified model can manage varied loads weigh heavily on future research. This ongoing inquiry speaks to the delicate balance between inspiration from nature and the practicality of robotic applications.
As we peer into this fusion of biology and engineering, we stand on the brink of revolutionary robotics possibilities. By capturing the elegance of the elephant trunk’s movement mechanics, scientists are opening doors to new technologies that could redefine how we interact with machines and automate tasks. While overcoming the limitations of current models remains a hurdle, the profound insights gained from studying these biological wonders lay a solid foundation for the next generation of robotics. The conversation around biomimetic design and its implications for future innovations is only just beginning.